Linux
operating system in EDK
Linux operating system kernel
compilation:
Launch the EDK and open the project from the "Embedded Development
Kit" exercise:
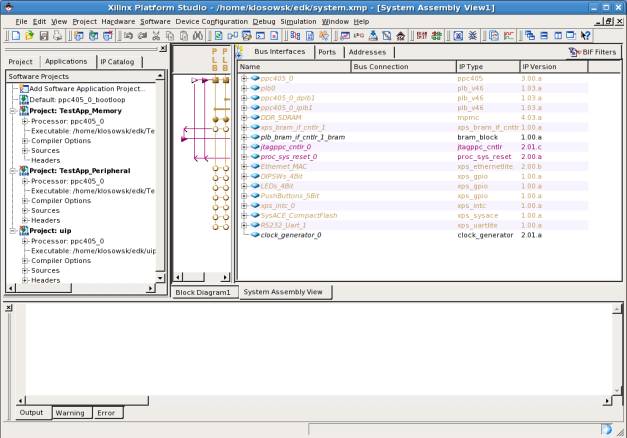
The project window will appear:
Now you will configure the EDK to generate the device tree. The device
tree holds hardware configuration data needed by Linux kernel (the kernel uses
device tree to access devices at proper addresses, interrupts, etc.).
Click menu Software and then Software Platform Settings
(or icon: ![]() ).
).
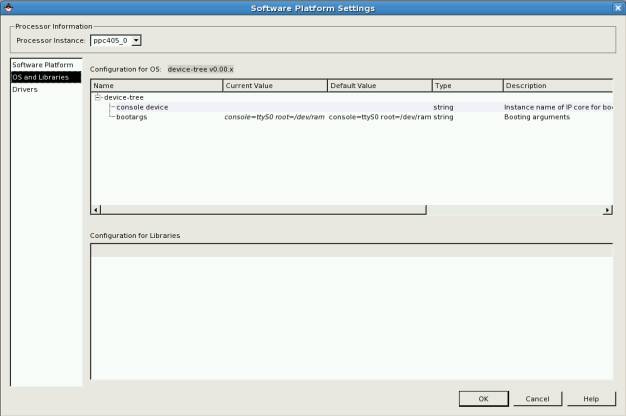
New window will show up:
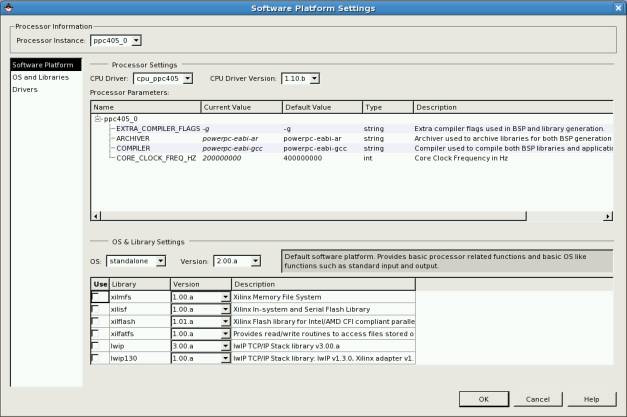
In the field OS:
change standalone to device-tree.
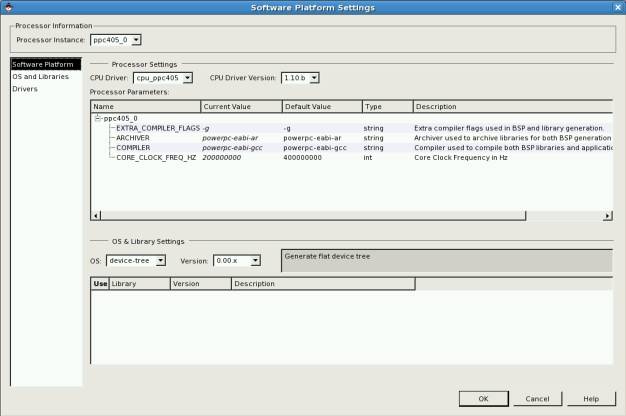
Then click OS and Libraries:
Now, in the field console device write: RS232_Uart_1
In the field bootargs
change: console=ttyS0 to console=ttyUL0
(we are using UartLite in place of standard 16550).
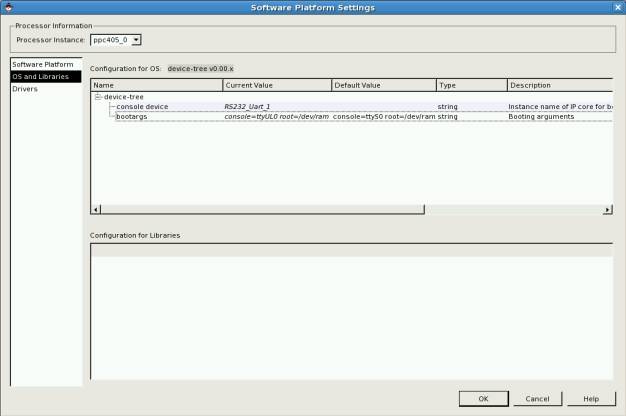
Then click OK.
Click Software and then Generate Libraries and BSPs (or the icon: ![]() ).
).
This will generate the file: xilinx.dts containing the device tree.
This file will be written to the directory (under the project main
directory):
ppc405_0/libsrc/device-tree_v0_00_x
Now you will compile the Linux kernel.
Open the terminal and (in the home directory) run the script:
linux-kernel-copy
This script will copy the Linux kernel distribution directory to your
home directory.
Then in the terminal window run the command:
source source_me
This will set all needed environment variables for PowerPC C compiler.
Then enter the Linux Kernel distribution directory:
cd linux-2.6-xlnx
and run the configuration manager:
make menuconfig
new window will be displayed:
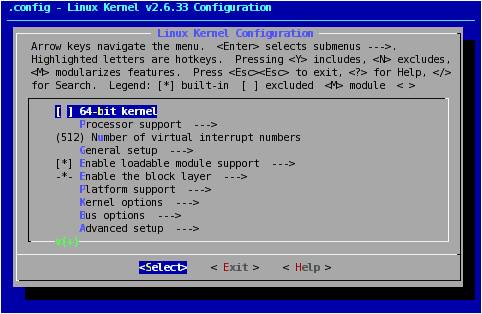
Main settings (like processor version) are already properly prepared.
You only have to enable GPIO access:
To enable GPIO choose option:
Device Drivers --->
And press ENTER.
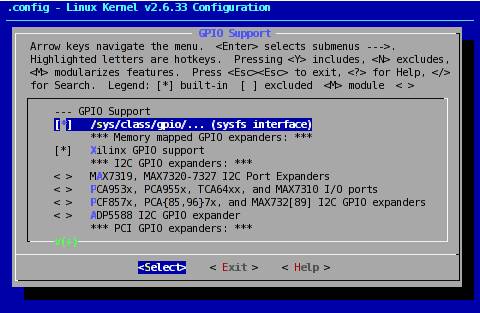
Then choose next option:
GPIO Support --->
And press ENTER.
Then check the following position (using SPACE):
/sys/class/gpio/... (sysfs interface)
The asterisk symbol (*) means the option is checked:
Then press Exit several
times, when the save confirmation is displayed press Yes – the application will be closed and current
configuration will be written to the .config file.
Now you must copy previously generated file with device tree: (it is
assumed that edk is your current project directory):
cp
~/edk/ppc405_0/libsrc/device-tree_v0_00_x/xilinx.dts ~/linux-2.6-xlnx/arch/powerpc/boot/dts/virtex405-lab.dts
Then copy the file with root filesystem for Linux:
cp
/opt/buildroot/initrd.patched.ext2.gz
~/linux-2.6-xlnx/arch/powerpc/boot/ramdisk.image.gz
Now you can begin the kernel compilation process
(your current directory should be: linux-2.6-xlnx):
make -j
2 simpleImage.initrd.virtex405-lab
Build process takes about 8 minutes. Compiled kernel is copied to the following
file:
~/linux-2.6-xlnx/arch/powerpc/boot/simpleImage.virtex405-lab.elf
Now you will run the Linux on the Development Board.
You do not have to start EDK system. You can download
the bit file to the FPGA using following commands (it is assumed that edk is
your project directory):
cd ~/edk
impact
-batch etc/download.cmd
rlwrap
-c xmd -opt etc/xmd_ppc405_0.opt
This procedure will download *.bit file generated
previously and then start the XMD debugger in separate window. The connection
to the board will be created automatically.
Run the MINICOM and check if the connection speed is 115200
bps (if not use following commands to change it: CTRL-A Z P I <Enter>.).
Now in the XMD window (prompt XMD%) enter following
commands:
cd
~/linux-2.6-xlnx/arch/powerpc/boot
dow
simpleImage.initrd.virtex405-lab.elf
run
This procedure is faster than loading the kernel file
by software debugger.
After the system is loaded log on as user root
(without password) at MINICOM console.
Mount your home directory from the laboratory PC
(enter your login in place of dots):
mount -o
rsize=1500,wsize=1500 192.168.1.1:/home/...
/mnt
You can also mount the application directory (you can
use host names or IP numbers, for example: labhost or 192.168.1.1 is the
address of the second network card of laboratory PC):
mount -o
rsize=1500,wsize=1500 labhost:/opt_local
/opt
System Linux running on PowerPC (FPGA) has IP network
address: 192.168.1.2 and host name: xilinx.
rsize and wsize options limit the packet length to
the standard Ethernet packet, (to avoid
packet fragmentation and performance penalty) – the MAC controller in the FPGA
doesn’t support large frames.
GPIO support at userspace
level (suggested solution):
To try the access to the LEDs and switches on the
development board change current directory:
cd
/sys/class/gpio
Then display directory contents:
ls –al
total 0
drwxr-xr-x
5 root root 0 May
8 23:32 .
drwxr-xr-x
15 root root 0 May
8 23:32 ..
--w-------
1 root root 4096 May
9 02:23 export
drwxr-xr-x
2 root root 0 May
8 23:38 gpiochip243
drwxr-xr-x
2 root root 0 May
8 23:38 gpiochip248
drwxr-xr-x
2 root root 0 May
8 23:38 gpiochip252
--w-------
1 root root 4096 May
9 02:42 unexport
gpiochipxxx directories contain information about available GPIO
devices.
To be accessible GPIO ports have to be exported to
the user first. You can achieve this by writing port id to the export file.
Ports are one bit wide and have following ids:
Push buttons (5 ports): 243-247
LEDs (4 ports): 248-251
Switches (4 ports): 252-255
# ls
export
gpiochip243 gpiochip248 gpiochip252
unexport
# echo 248 > export
# ls
export
gpio248 gpiochip243 gpiochip248
gpiochip252 unexport
New catalog has been created due to export command: gpio248
This catalog contains files for exported GPIO bit
control:
# cd gpio248
# ls
active_low
direction subsystem uevent
value
Set the port direction to out:
# echo out > direction
Now you can write the logic value to the port:
# echo 1 > value
# echo 0 > value
Or you can switch the port direction to in
and read the logic value from the port by reading the value file
contents.
Now unexport the port:
# cd ..
# echo 248 > unexport
# ls
export
gpiochip243 gpiochip248 gpiochip252
unexport
Below simple script for LED and switch control is
presented:
(LEDs blink, state of the switches is printed every 2
seconds):
#!/bin/sh
cd /sys/class/gpio
echo "248" > export
echo "249" > export
echo "250" > export
echo "251" > export
echo "252" > export
echo "253" > export
echo "254" > export
echo "255" > export
echo out > gpio248/direction
echo out > gpio249/direction
echo out > gpio250/direction
echo out > gpio251/direction
echo in > gpio252/direction
echo in > gpio253/direction
echo in > gpio254/direction
echo in > gpio255/direction
while true ; do
sleep
1
echo 0
> gpio248/value
echo 1
> gpio249/value
echo 0
> gpio250/value
echo 1
> gpio251/value
sleep
1
echo 1
> gpio248/value
echo 0
> gpio249/value
echo 1
> gpio250/value
echo 0
> gpio251/value
echo
-n `cat gpio252/value`
echo
-n `cat gpio253/value`
echo
-n `cat gpio254/value`
echo `cat gpio255/value`
done
When exiting the application outputs should be
disabled (direction switched to in) and ports should be
unexported:
#!/bin/sh
cd /sys/class/gpio
echo in > gpio248/direction
echo in > gpio249/direction
echo in > gpio250/direction
echo in > gpio251/direction
echo "248" > unexport
echo "249" > unexport
echo "250" > unexport
echo "251" > unexport
echo "252" > unexport
echo "253" > unexport
echo "254" > unexport
echo "255" > unexport
It is of course possible to access GPIO using other
scripting languages (like TCL) or compiler languages (like C, C++, etc.) – you
just use the file system interface of the chosen language.
Task: implementation of mini
web server for remote LED control and switch status readout
Use simplified httpd server available in the PowerPC
Linux system (/usr/sbin/httpd).
Write simple CGI application for GPIO control and
integrate it with web server.
CGI can be written in scripting language (shell ash –
simplified version of bash), in TCL language (tclsh8.4), in C language (simple
hello-world compilation example presented below).
Additional information about CGI can be found below:
·
CGI in TCL: http://expect.nist.gov/doc/cgi.pdf
·
CGI in ash: http://isquared.nl/index.html?pagelink=9&desc=bourne/_bash_shell_cgi_scripts
·
CGI in C: http://www.cs.tut.fi/~jkorpela/forms/cgic.html
httpd is a simplified www server:
Usage: httpd [-ifv[v]] [-c CONFFILE] [-p
[IP:]PORT] [-u USER[:GRP]] [-r REALM] ]
or httpd -d/-e/-m STRING
Listen for incoming HTTP requests
Options:
-i Inetd mode
-f Don't daemonize
-v[v] Verbose
-c FILE Configuration
file (default httpd.conf)
-p [IP:]PORT Bind to ip:port (default
*:80)
-u USER[:GRP] Set uid/gid after
binding to port
-r REALM Authentication
Realm for Basic Authentication
-h HOME Home directory
(default .)
-m STRING MD5 crypt STRING
-e STRING HTML encode STRING
-d STRING URL decode STRING
You can run the server this way:
httpd -h
home_directory_of_www_page
CGI scripts should be placed in subdirectory
/cgi-bin/
You can also write the configuration file for the
server, sample configuration file is presented below:
H:/serverroot # define the server root. It will
override -h
A:172.20. # Allow address from 172.20.0.0/16
A:10.0.0.0/25 # Allow any address from
10.0.0.0-10.0.0.127
A:10.0.0.0/255.255.255.128 # Allow any address that previous set
A:127.0.0.1 # Allow local loopback connections
D:* # Deny from other IP
connections
E404:/path/e404.html #
/path/e404.html is the 404 (not found) error page
I:index.html # Show index.html when a directory is
requested
P:/url:[http://]hostname[:port]/new/path
# When /urlXXXXXX is requested, reverse proxy
# it to http://hostname[:port]/new/pathXXXXXX
/cgi-bin:foo:bar # Require user foo, pwd bar on urls starting
with /cgi-bin/
/adm:admin:setup # Require user admin, pwd setup on urls
starting with /adm/
/adm:toor:PaSsWd # or user toor, pwd PaSsWd on urls starting
with /adm/
.au:audio/basic # additional mime type for audio.au files
*.php:/path/php # run xxx.php through an interpreter
A/D may be as a/d or
allow/deny - only first char matters.
Deny/Allow IP logic:
- Default is to allow all (Allow all (A:*) is a no-op).
- Deny rules take precedence over allow rules.
- "Deny all" rule (D:*) is applied last.
Example:
1. Allow only specified addresses
A:172.20 #
Allow any address that begins with 172.20.
A:10.10. #
Allow any address that begins with 10.10.
A:127.0.0.1 #
Allow local loopback connections
D:* # Deny
from other IP connections
2. Only deny specified addresses
D:1.2.3. # deny
from 1.2.3.0 - 1.2.3.255
D:2.3.4. # deny
from 2.3.4.0 - 2.3.4.255
A:* #
(optional line added for clarity)
If a sub directory contains
a config file it is parsed and merged with any existing settings as if it was
appended to the original configuration.
subdir paths are relative to
the containing subdir and thus cannot affect the parent rules.
Note that since the sub dir
is parsed in the forked thread servicing the subdir http request, any merge is
discarded when the process exits.
As a result, the subdir
settings only have a lifetime of a single request.
Custom error pages can
contain an absolute path or be relative to 'home_httpd'. Error pages are to be
static files (no CGI or script).
Error page can only be
defined in the root configuration file and are not taken into account in local
(directories) config files.
If -c is not set, an attempt
will be made to open the default root configuration file. If -c is set and the file is not found, the
server exits with an error.
Show the running server to the instructor.
Appendix -
Compilation of C program for
PowerPC (for CGI in C):
Compilation is performed on the PC, then using the home
directory, which can be mounted on PowerPC Linux system, you can easily run the
compiled program on the laboratory board.
Run the following command in the terminal window:
source source_me
Create main.c file.
For example:
#include
<stdio.h>
main()
{
printf("Hello World!\n");
}
Then compile it using static linkage:
ppc_4xx-gcc
main.c -o main -static
Now you can start compiled program in MINICOM window.